Introduction
When working with embedded electronics, microcontroller based systems in particular, it’s often necessary to monitor their state remotely. Microcontrollers can be difficult to debug and monitor because they are basically computers without peripherals. Although it’s possible to permanently attach a display and input device to a microcontroller, it’s usually impractical, as they are often embedded in hard to reach dynamic systems. In cases where it is necessary to have the ability to monitor or reconfigure microcontroller based systems, doing so through a wireless link can greatly simplify the process. In the case of mobile objects, like robots or unmanned-vehicles, a wireless link might be the only option.
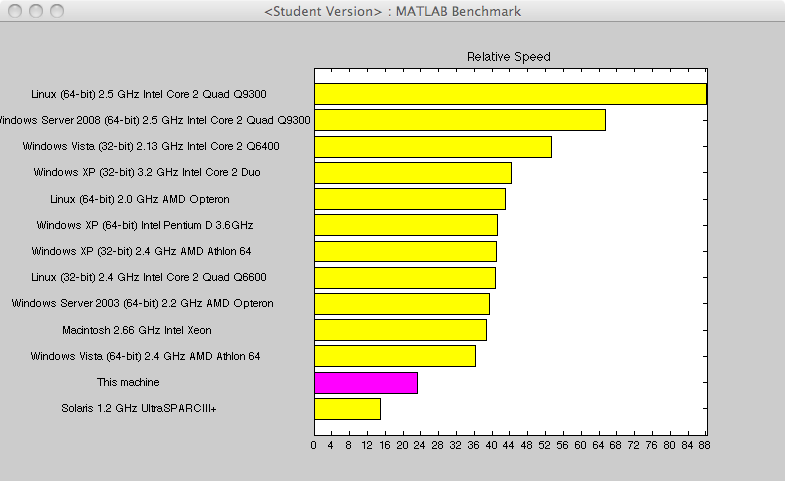
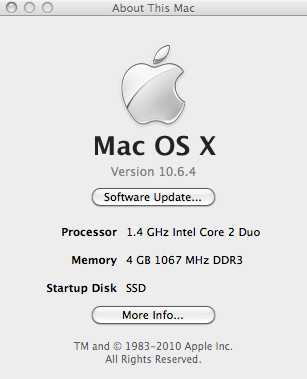
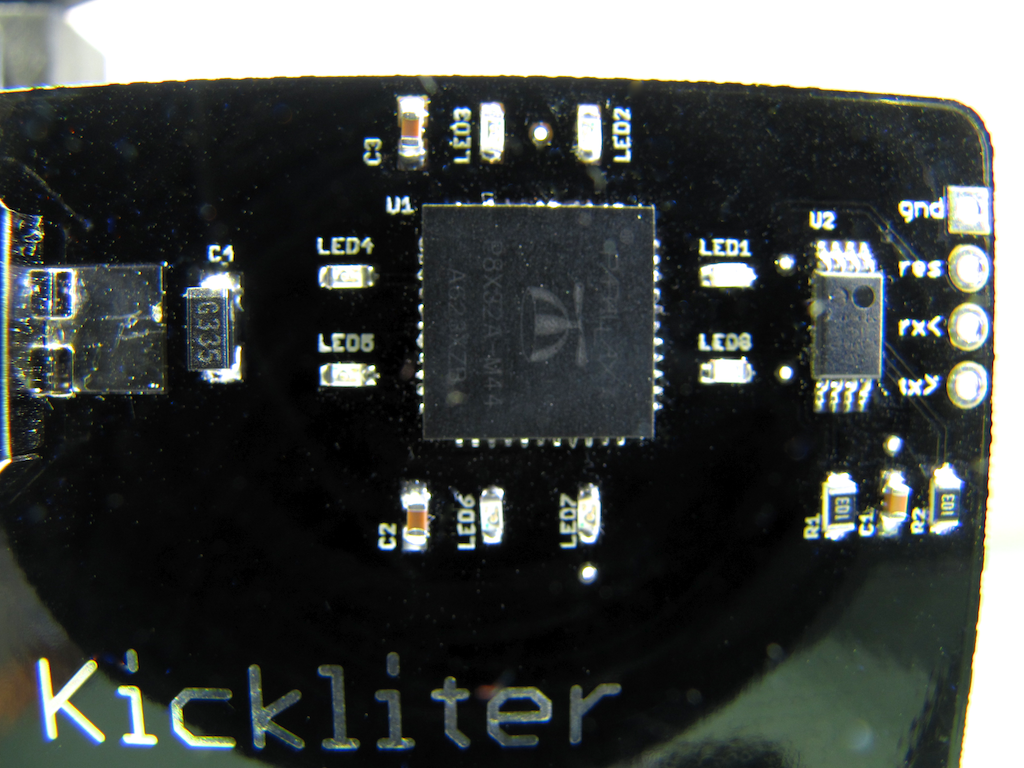
There are several ways a wireless link be established between two systems. In this example, we’ll be establishing a link between a microcontroller on the remote end, and monitoring the data it sends on a local computer. Although almost any combination of microcontroller and computer could be used, this example will use a Propeller Chip, an eight core microcontroller made my Parallax, and an Apple laptop computer.
For a wireless link, we’ll use an XBee 900 module from Digi International. XBee modules are a good choice for small systems, because they are relatively cheap, and interchangeable. If for some reason you decide to replace a 900 MHz module with a 2.4 GHz module, minimal re-configurations are needed. The reason for using a 900 MHz module in this example as apposed to a marginally faster 2.4 GHz unit is because of the superior range that comes with using 900 MHz.
XBee modules can be operated in two different modes: transparent and API. Transparent mode is very convenient since the modules require no configuration; every byte pushed into one module exits the other as though there’s a serial cable connecting them. Despite the convenience of using transparent mode, we’ll be using API mode. It’s a bit more difficult to implement, but the benefits outweigh the added complexity. API mode allows greater control of the link, with the ability to send packets to an explicit address. In contrast, when data in sent in transparent mode, it is sent to all modules within range.
Protocol
In transparent mode, transmission of a byte only requires it to be sent to the local XBee. After a certain timeout period, that XBee module packetizes any bytes in its buffer and sends them to the remote XBee(s), which output the bytes to whatever hardware is attached to them. API mode is a bit different. Much of the data formatting that is done automatically by the XBee in transparent mode needs to be performed before the user can transmit. For instance, the procedure to transmit the byte value 0x7E in transparent may look like this (in pseudo code):
serialTransmit(0x7E)
Sending data in API mode is not so simple. Before further discussion, it must be noted that API mode has two sub-modes: escaped and unescaped. Escaped mode requires that any data that can conflict with API control-characters must be preceded by 0x7D and XOR’d with 0x20. That procedure ensures that the XBee module won’t be confused with any user data that happens to be same as any of the XBee control characters. This example will use escaped mode. It has the added benefit of making it easier to program receive routines.
Let’s revisit our earlier example of sending the byte 0x7E. All that was required to send a byte was a single function call. In API mode several packet formatting steps must first take place:
- Create a temporary buffer guaranteed to be bigger than needed
- Insert 0x7E into position 0, this is the XBee frame delimiter, indicating the start of a new API packet.
- Calculate the length of the packet, which in our case will be several bytes longer than the single 0x7E we want to send. Put the upper 8 bits of that length into buffer position 1, and the lower 8 bits into position 2.
- Add the XBee API identifier to position 3. There are several ID’s for different purposes, but we are trying to send a packet to another XBee, so we will use 0x10, which is the TX Request id.
- Insert a unique frame ID byte into position 4. This is not very important unless you want the module to respond with an acknowledge packet that it received the transmit request. However, a byte needs to be here, so we’ll use 0x01.
- Insert the 64 bit address of the remote module into positions 5-12, send the most significant byte first. Let’s assume the remote XBee’s address is 0x13A200404B2277.
| 5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
| 0x00 |
0x13 |
0xA2 |
0x00 |
0x40 |
0x4B |
0x22 |
0x77 |
- Insert the 16 bit address of the network you are operating on into positions 13-14, MSB first. We’ll use the address 0xFFFE, since it is the default.
- Insert 0x00 into both position 15 and 16. These fields have definitions, but are not flexible and serve no real purpose.
- Finally, starting at position 17, insert however many bytes you need to send. In our case, just insert 0x7E into position 17.
- Calculate the checksum of the packet and insert it into position n, which in our case is 18. To calculate checksum, we add all the bytes from positions 3 to n-1, discarding any carry and keeping only the bottom 8 bits. Subtract this number from 0xFF. What is left over is our checksum. Checksum = 0xFF - ((0x00 + 0x01 + 0x00 + 0x13 + 0xA2 + 0x00 + 0x40 + 0x4B + 0x22 + 0x77 + 0xFF + 0xFE + 0x00 + 0x00 + 0x7E) & 0xFF)
Checksum = 0xAA
- Our (almost) completed packet looks like:
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
| 0x7E |
0x00 |
0x0F |
0x10 |
0x01 |
0x00 |
0x13 |
0xA2 |
0x00 |
0x40 |
| 10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
| 0x4B |
0x22 |
0x77 |
0xFF |
0xFE |
0x00 |
0x00 |
0x7E |
0xAA |
- Starting at byte 1, we must enumerate through the whole packet and escape any control characters. Any byte with the value 0x7E, 0x7D, 0x11, 0x13 must be replaced with 0x7D, and be followed by that byte’s value XOR’d with 0x20. Since our packet has a 0x13 at index 6, and a 0x7E at index 17, we will have to do two escapes. After escaping those two bytes, our packet will look like this:
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
| 0x7E |
0x00 |
0x0F |
0x10 |
0x01 |
0x00 |
0x7D |
0x33 |
| 8 |
9 |
10 |
11 |
12 |
13 |
14 |
| 0xA2 |
0x00 |
0x40 |
0x4B |
0x22 |
0x77 |
0xFF |
| 15 |
16 |
17 |
18 |
19 |
20 |
| 0xFE |
0x00 |
0x00 |
0x7D |
0x5E |
0xAA |
- Lastly, all that is left in order to send the packet is to transmit bytes to the XBee module over the serial line.
Implementation
Since a link is no good unless there is something on both ends to process the data it carries, we’ll have to implement the XBee packet processing on both the remote and local ends. In this case, the remote end is a Propeller Chip, and the local end is an Apple MacBook computer. Since they both use different programming languages, and have different functionality, we’ll have to create send an receive functionality twice. The Propeller Chip is a 32-bit 8 core microcontroller, has no operating system, and is programmed in a quasi object-orientated language called Spin. The MacBook is programmed with the NeXTstep API, which was acquired by Apple Computer and renamed Cocoa. Cocoa is programmed in Objectective-C, and plain ANSI C.
Propeller Chip
Because the Propeller Chip is multi-cored, it is actually quite easy to implement XBee send and receive functionality.
Receive Function
PUB receivePacket(_escaped) | char, index, length, checksum
'clear lenght and checksum to 0
length~
checksum~
'receive bytes until we get a 0x7E
repeat until (char := uarts.rx(port)) == $7E
'get a byte, escape it if needed, and make it the first length
'word by shifting it 8 bits to the left
char := uarts.rxtime(port, 1)
if char == $7D AND _escaped
length |= (uarts.rx(port) ^ $20) << 8
else
length |= char << 8
'do the same, but don't shift this time, since the next byte
'is the lowsest signifigant byte of the length word
char := uarts.rxtime(port, 1)
if char == $7D AND _escaped
length |= (uarts.rx(port) ^ $20)
else
length |= char
'clear index to 0
index~
'repeat length times
repeat while index < length + 1
char := uarts.rx(port)
'need to un-escape it
'0x7D indicates that the next byte is the actual byte
'we ignore the 0x7D and use the next byte
if char == $7D
'XOR the char with 0x20
receiveBuffer[index] := uarts.rx(port) ^ $20
'not an escaped byte, take it as is
else
receiveBuffer[index] := char
'calculate checksun with every iteration of the loop
'advance the index variable by 1
checksum += receiveBuffer[index++]
'AND checksum with 0xFF do keep only the lower 8 bits
checksum &= $FF
'if we have a valid packet, all the bytes after lenght, including
'the last byte, checksum, added together equal 0xFF
if checksum <> $FF
'checksum didn't check out, return -1 to the caller
return -1
'so far, this receive method only accounts for packets
'sent from other XBee modules, not acknowlege packets
'or various status packets
case receiveBuffer[0]
'if the first byte after length is 0x90, we are dealing
'with received packet from another XBee module
'subtract 12 from length, since the user is only concerned with
'the length of the meaningful data in the packet, not addresses
'and such, since they are static, and always the same length
$90: rxLength := length-12
'shift then AND bytes 1..4 to get the upper 32 bit address
'of the sending module
rxRemoteAddressUpper32 := receiveBuffer[1] << 24
| receiveBuffer[2] << 16
| receiveBuffer[3] << 8
| receiveBuffer[4]
'shift then AND bytes 5..8 to get the lower 32 bit address
'of the sending module
rxRemoteAddressLower32 := receiveBuffer[5] << 24
| receiveBuffer[6] << 16
| receiveBuffer[7] << 8
| receiveBuffer[8]
'shift then AND bytes 10..11 to get the 16 bit network address
rxNetworkAddress16 := receiveBuffer[10] << 8
| receiveBuffer[11]
'move the important data from receiveBuffer[] to rxData[]
'so the caller can access it
bytemove(@rxData, @receiveBuffer[12], rxLength)
'return 0x90 to the caller, so it knows an rx packet was
'received
return $90
Send Function
pub apiArray(_64BitDestinationAddressUpper, _64BitDestinationAddressLower, _16BitNetworkAddress, _arrayAddress, _arraySize, _escaped)| Length, chars, checkSum,ptr,sourceArrayPtr
'clear the index
ptr := 0
'add 0x7E to byte 0 of array
dataSet[ptr++] := $7E
'_arraySize is set by caller, we have to add 14 to it
'to account for the added bytes API mode requires
Length := 14 + _arraySize
'add MSB of length to array
'add LSB of length to array
dataSet[ptr++] := Length >> 8
dataSet[ptr++] := Length
'add 0x10 to indicade a TX request API packet
dataSet[ptr++] := $10
'add frame id, value passed in but isn't important
dataSet[ptr++] := _FrameID
'the remote 64 bit address is passed by caller
'in two longs, we need to split up those 2 longs
'into 8 bytes and add them to the array
dataSet[ptr++] := _64BitDestinationAddressUpper >>24
dataSet[ptr++] := _64BitDestinationAddressUpper >>16
dataSet[ptr++] := _64BitDestinationAddressUpper >>8
dataSet[ptr++] := _64BitDestinationAddressUpper
dataSet[ptr++] := _64BitDestinationAddressLower >>24
dataSet[ptr++] := _64BitDestinationAddressLower >>16
dataSet[ptr++] := _64BitDestinationAddressLower >>8
dataSet[ptr++] := _64BitDestinationAddressLower
'the 16 bit network address is passed by caller
'as a word, we need to split it into 2 bytes
dataSet[ptr++] := _16BitNetworkAddress >>8
dataSet[ptr++] := _16BitNetworkAddress
'unimportant, but the XBee expects these two bytes
dataSet[ptr++] := $00
dataSet[ptr++] := $00
'the caller passed us the address to a byte array
'that is in HUB memory, the caller also passed
'in _arraySize, so we know how many bytes from that
'array to read. Jut loop until we have read all the
'bytes and written them into our array
repeat sourceArrayPtr from 0 to _arraySize - 1
dataSet[ptr++] := byte[_arrayAddress++]
'start with checksum equals 0xFF, then we subtract all
'the bytes we encounter in our outgoing packet until
'we reach the end
checkSum := $FF
Repeat chars from 3 to ptr-1
checkSum := checkSum - dataSet[chars]
'add our calculated checksum to the end off the array
dataSet[ptr] := checkSum
'if in escaped mode, loop through our outgoing
'array and escape any characters as necessary
'send them on the fly to the XBEee module
'there's no need to store them in memory first
if (_escaped)
tx(dataSet[0])
Repeat chars from 1 to ptr
if (dataSet[chars] == $7E OR
dataSet[chars] == $7D OR
dataSet[chars] == $11 or
dataSet[chars] == $13)
tx($7D)
tx(dataSet[chars] ^ $20)
else
tx(dataSet[chars])
'if not escaped mode, send the bytes as they are
else
Repeat chars from 0 to ptr
tx(dataSet[chars])
Computer
Due to the nature of event driven Objective-c, the computer code is a bit fragmented and spans many more lines and several files. It’s a bit out of scope to include in this post, but source is available for download.
Downloads
Cocoa Code
Propeller Code
It occurred to me that the code I printed does not match the code I have for download. Also, I think it would serve people better to have a ready made project. I don’t have much spare time these days. But I’ll post a follow up with better code that should work out of the box, assuming you have a Propeller prototyping board of any kind, two XBees, an Apple computer and an XBee <-> USB adapter. Unfortunately, I have to target a narrow demographic with the same setup as mine. I apologize to the Windows and Linux users out there.
;)
 microcontrollers | tagged
microcontrollers | tagged ;)